I deploy RASA X on Kubenetes (Cloud OVH) for create a french chatbot (student project).
The documentation is explicit for add Spacy model on RASA or on a local RASA X.
But I can’t find the Helm commands for adding this Spacy french model (“fr_core_news_sm”) on RASA X deployed on Kubernetes (and how add Spacy NLP in the pipeline )
HI @DROMZEE, to add a dependency to your Rasa node, you need to build an image based on Rasa e.g.
FROM rasa/rasa:1.10.0-full
RUN python -m spacy download fr_core_news_sm
RUN python -m spacy link fr fr_core_news_sm
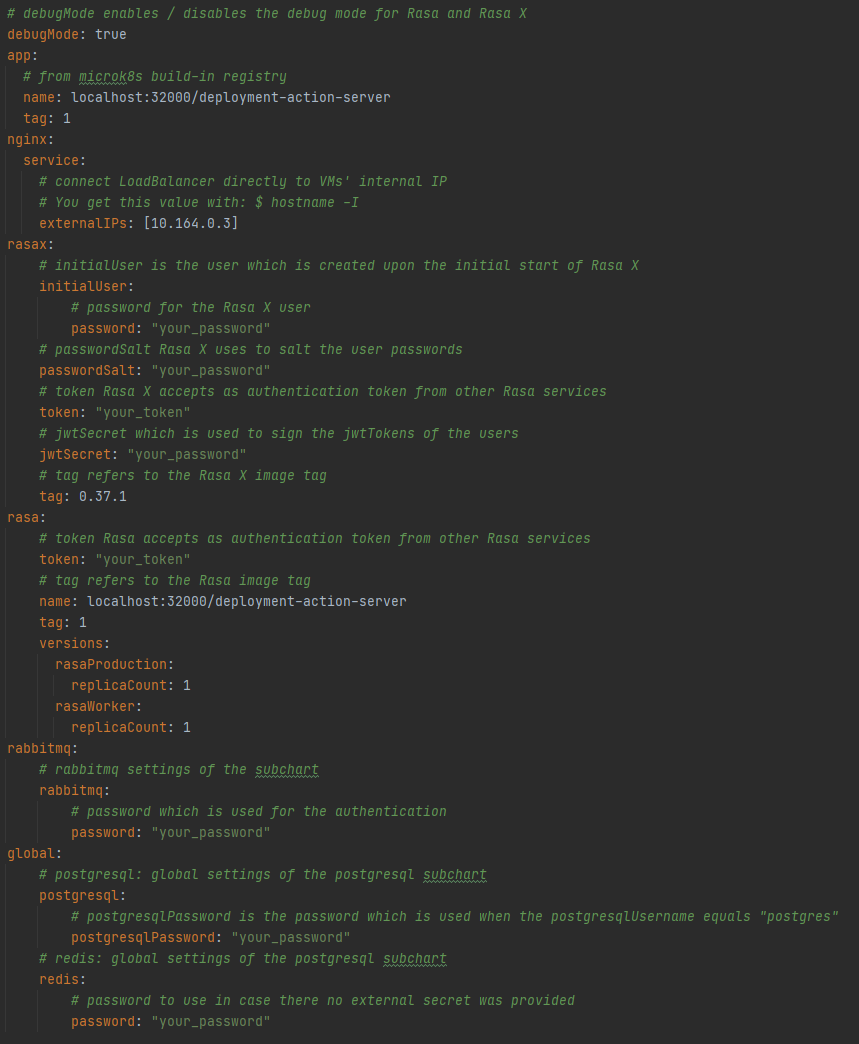
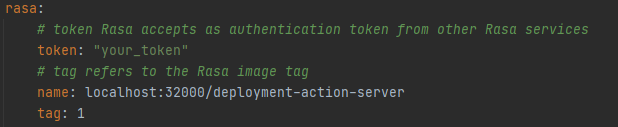
Then you can update the helm charts to use your custom rasa image e.g. in values.yaml:
# rasa: Settings common for all Rasa containers
rasa:
# name of the Rasa image to use
name: "my/rasa_fr"
# tag refers to the Rasa image tag
tag: "latest" # Please check the README to see all locations which have to be updated for a rasa release)
I just have finished the “Rasa Advanced Deployment Workshop” on UDEMY and I would like to use the Spanish library from SPACY. Using your previous instructions to DROMZEE I would like to know in which POD of the architecture has to install SPACY? Or may I have to use another one?
Thanks for the details! that’s certainly one way to do it - the other is to have two custom images, one for your action server and one for Rasa only, and otherwise follow these instructions.
As I mentioned I’m new to K8s (microk8s), so I’d like to check again … in the same pod the instructor installed the action server I’m going to install SPACY? I thought Rasa Open Source was installed in another Pod … again thank you so much!!!
What @Johan1us describes is using the same image for rasa and the action server. This has the advantage of only building one custom image, but it means your action server image becomes much larger, since usually it would only have rasa_sdk installed, not rasa and all its dependencies too.
This previous post RASA X on Kubernetes cluster -> How to add SpacyNLP with Helm - #2 by mloubser describes building a custom image only for rasa, not the action server. In this case, it is only the rasa pods that need the custom image. Both rasa-production and rasa-worker will read the settings under the rasa key in values.yml, so you should be good to use those instructions as a template for your use case.